The Maze【Turing Complete編】
目次
はじめに
いつもブログをご覧いただきありがとうございます。
ミジンコに転生したIPUSIRONです😀
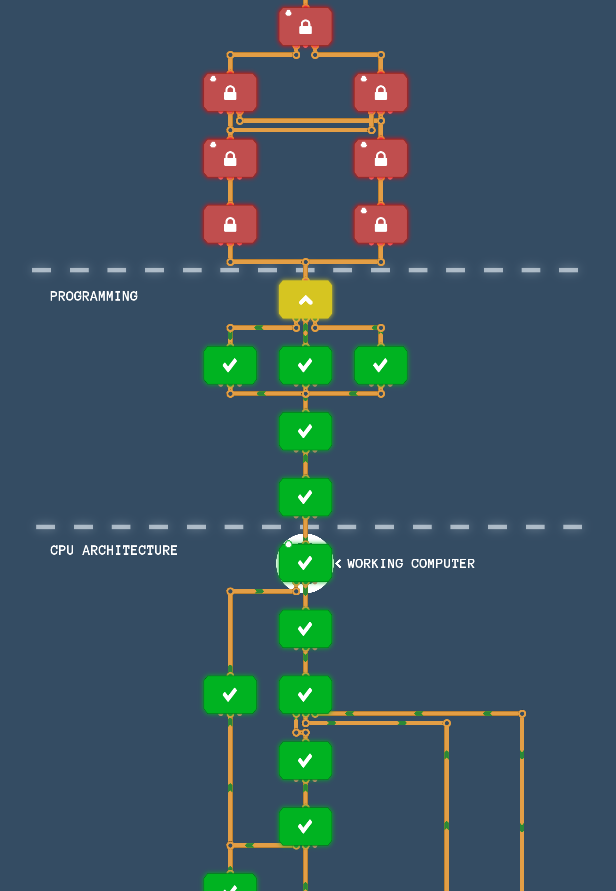
The Mazeステージ
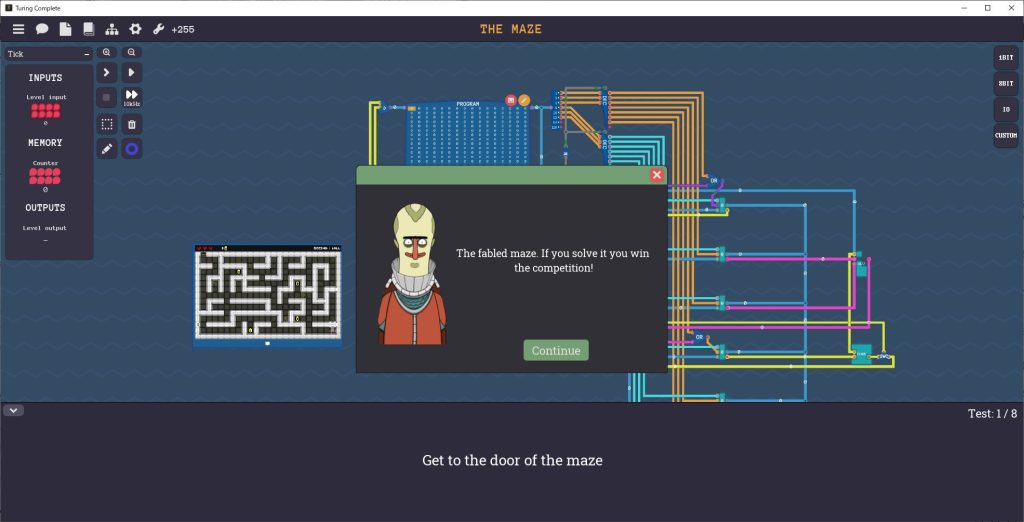
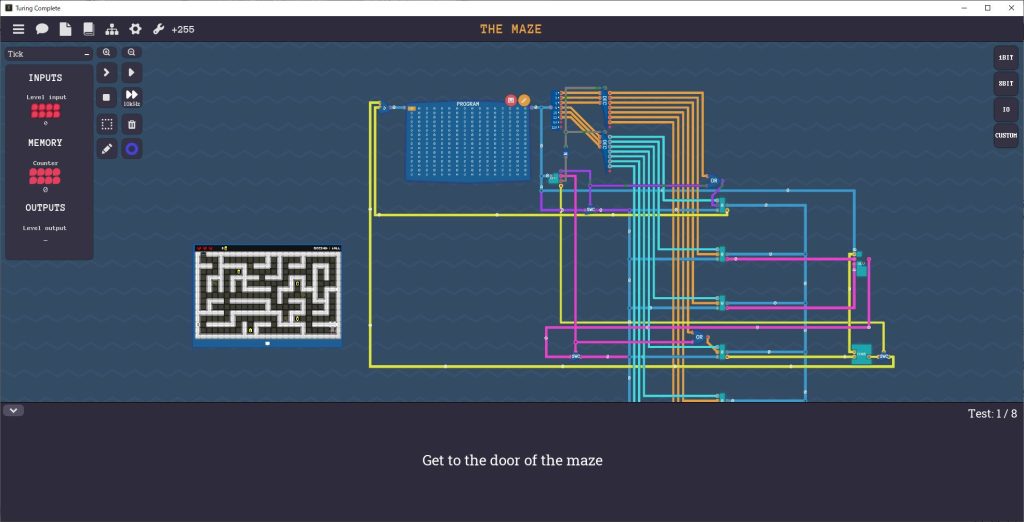
The Mazeステージは、Programmingセクションの最終ステージです。
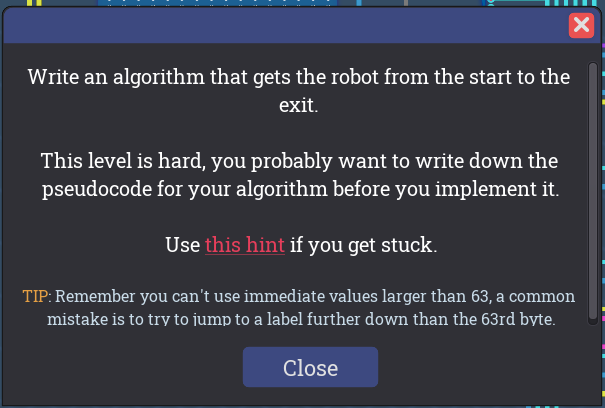
当ステージのゴールは、ロボットを迷路から脱出させることです。
CPUから数値を出力することで、ロボットを制御できます。どの数値でどういった制御ができるのかについては、Spacial Invasionステージで解説しました。

これまで学習した内容を復習する形で、迷路脱出アルゴリズムを実装します。
迷路の仕様
・迷路は固定。ランダムに生成されない。
⇒(条件分岐を使わない)ごり押しのプログラムで解ける。ただし、別の迷路になると解けなくなる。
⇒テストでは8つの迷路を解くことになる。1つ目の迷路が終わると、2つ目の迷路が現れる。
⇒あらゆる迷路にも対応したプログラムを作る必要がある。
・すべての経路を探索するわけではない。
・最短の経路を見つけるわけではない。
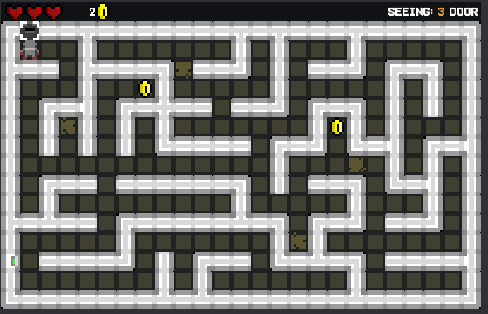
・ロボットのスタート位置は右下。ゴールは左上のドア。
・迷路のゲームにはコインが存在するが、今ステージではコインを取る必要はない。
※すべてのコインを拾うという条件はない。
・コインの先にゴールはないので、一種の障害物を認識しても支障はない。
・Spacial Invasionステージで登場したロボットと同じなので、レーザーを撃てる。今ステージでは不要。
・ドアは空いていない。ドアに重なることはできない。レーザーをドアを破壊できない。ドアに向かってaction(物体調査)をすればOK。
・ドアの物体コード3、壁は1、コインは8である。
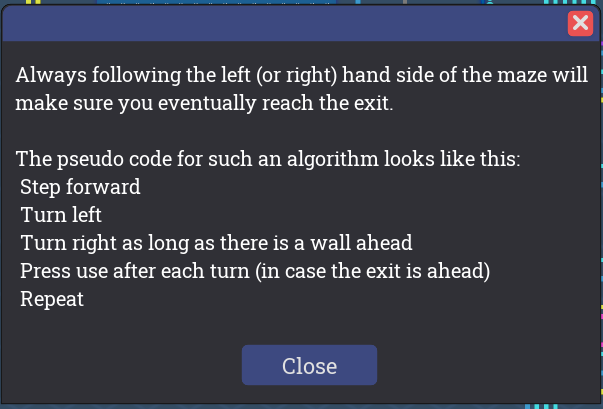
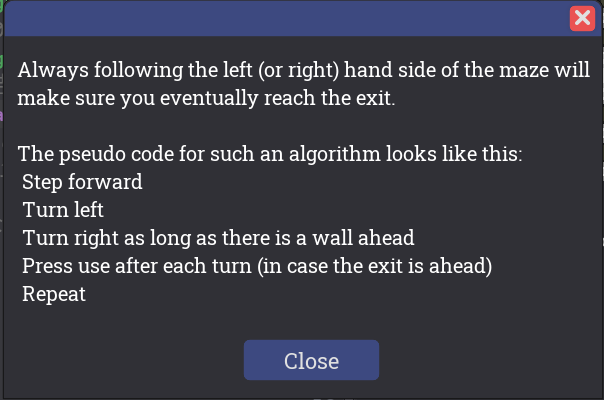
左手法で迷路を攻略する
迷路を脱出するための必勝法として、左手法(左手の法則)があります[1]https://ja.wikipedia.org/wiki/%E8%BF%B7%E8%B7%AF。
左手法とは、左手伝いに進めば出口にたどり着くという手法です。
左手を迷路の壁に当てながら、道に沿ってずっと進んでいきます。途中で壁にぶつかったとしても、左手を当てながら戻っていきます。
ただし、次のような特殊な迷路については、左手法では脱出できないことがあります。
- 途中に落とし穴など進んではいけない場所がある迷路
- ゴールが迷路の中のに存在する迷路[2]大半のマイクロマウス競技では中央にゴールのある迷路が採用されます。
左手ではなく、右手を使っても脱出できます。これを右手法といいます。
左手法の具体的な実装方針
素朴に実装するには、二方向を調べられる必要がある
左手法を素朴に実装するには、左隣(左手が触れる方向)と前方(目の方向)の状況を把握する必要があります。
| ケース | 取るべきアクション |
|---|---|
| 「左壁あり」かつ「前壁あり」 | 右回転 |
| 「左壁あり」かつ「前壁がなし」 | 前進 |
| 左壁なし | 左折(左回転して前進) |
今回のロボットは前方しか調べられませんので、左隣を識別するにはそちらの方向を向く必要があります。
三方向を同時に調べらられれば、より効率的な動きができる
ロボットマウスのように前・左・右の方向にセンサーを取り付けられれば、一度に三方向を調べられます。つまり、次のように4パターンに分類でき、素早くアクションを取れます。
※Uターンができる分、効率的です。
| ケース | 取るべきアクション |
|---|---|
| 左壁なし | 左折(左回転して前進) |
| 「左壁あり」かつ「前壁なし」 | 前進 |
| 「左壁あり」かつ「前壁あり」かつ「右壁なし」 | 右折(右回転して前進) |
| 「左壁あり」かつ「前壁あり」かつ「右壁あり」 | Uターン |
※前進した直後は、後ろに壁がありません。そうでなければその場所に移動不可能だからです。


The Mazeステージを解く
1:ロボットの動作に対応する数値を定数化する
プログラムの冒頭で、ロボットの動作に対応する数値を定数化しておきます。
const LEFT 0
const FORWARD 1
const RIGHT 2
const ENJOY 3
const ACTION 4
const SHOOT 5
2:ゼロであるとき、ゼロでないときにジャンプする命令を定義する
ゼロであるときにジャンプする命令を"JZE"、ゼロでないときにジャンプする命令を"JNZ"という名前で定義します。
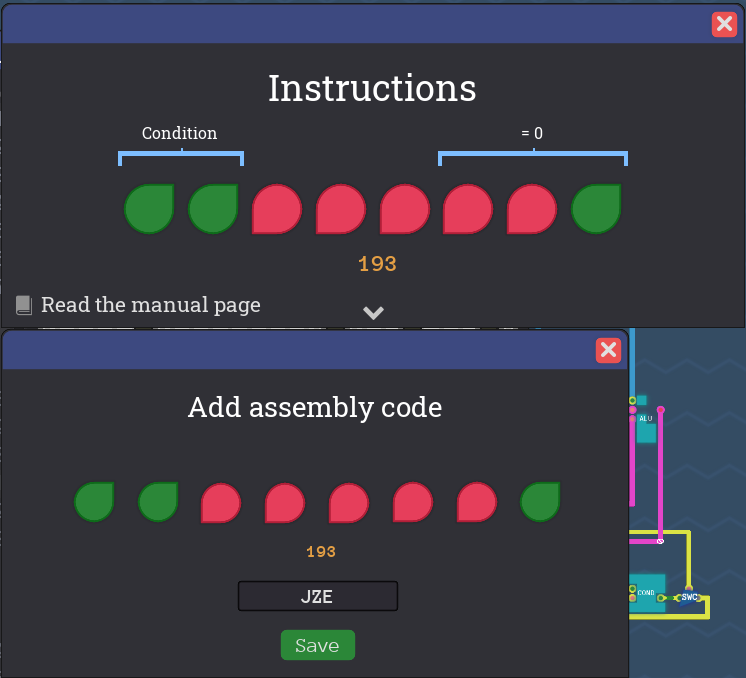
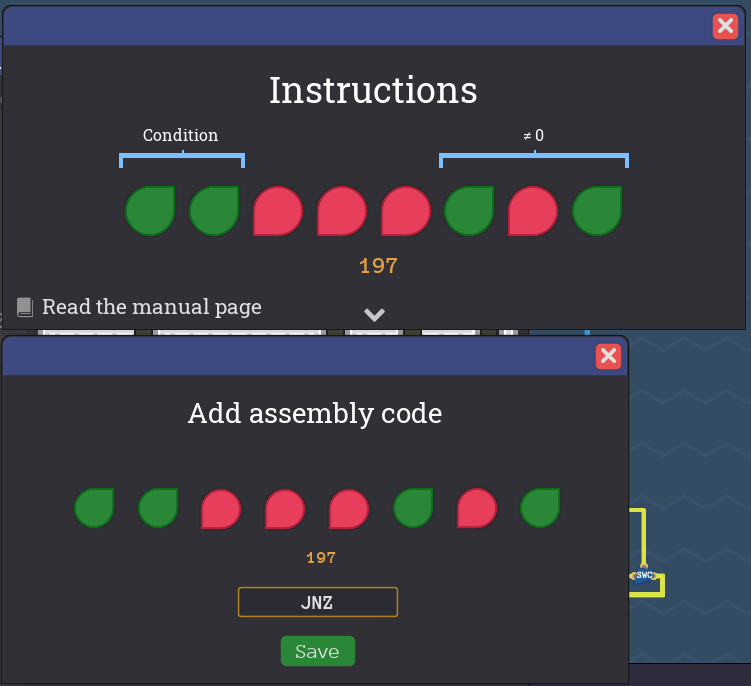
※今回のプログラムではJZEを使いますが、JNZを使いません。
3:プログラムの実装内容を検討する
左手法を実装するのに、ヒントが役立ちます。
この方法であれば左と前方を同時にチェックできなくても、左手法を再現できています。
| 処理番号 | 処理内容 |
|---|---|
| ① | 前方をチェックする。 (a) 障害物なら、右を向く。①に戻る。 (b) 障害物でなければ、前進して、左を向く。①に戻る。 |
上記の障害物の判定処理で留意することがあります。
障害物の有無だけをチェックすると、せっかくゴールのドア手前に来ても、ドアを障害物と認識してしまいます。そこで、単純にゼロかどうかではなく、壁(物体コード1)かどうかの条件が必要になります[3]ドア(物体コード3)かどうかの条件を組み込むアプローチでもうまくいきますが、壁の有無をチェックするのが自然です。。
| 処理番号 | 処理内容 |
|---|---|
| ① | 前方をチェックする。 (a) 壁なら、右を向く。①に戻る。 (b) 壁でなければ、前進して、左を向く。①に戻る。 |
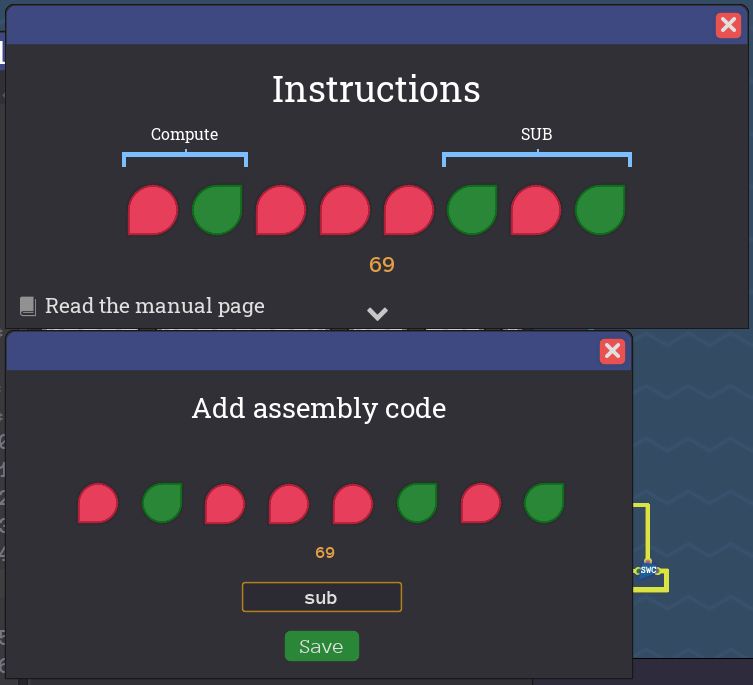
「前方の物体コード」から1(壁の物体コード)を引いて、それが0かどうかを判定条件にします。
そのために、1を引く命令を定義します。命令名は"sub"としました。
4:プログラムを実装する
次のプログラムが完成しました。
const LEFT 0
const FORWARD 1
const RIGHT 2
const ENJOY 3
const ACTION 4
const SHOOT 5
const OBJ_WALL 1 # 壁の物体コード
label main_loop
####################################
# 前方チェック. #
# 前方に壁があればジャンプ. #
####################################
ACTION
execute
IN # REG0←前方の物体コード.
reg0_to_reg1
OBJ_WALL # REG0←1(壁の物体コード).
reg0_to_reg2
sub # 計算結果はREG3へ.
wall_case # ジャンプ先を設定.
JZE # REG3に対して条件チェック.
#### 前方チェックここまで.
# 壁がないので、前進して左を向く.
FORWARD
execute
LEFT
execute
main_loop
JMP
# 壁ありなら右を向く.
label wall_case
RIGHT
execute
main_loop
JMP
5:テストする
最初の目標は1つ目の迷路を脱出することです。
※コインを拾いながら進みます。
2つ目の迷路をうまく脱出できたら、あとは放置しておきましょう。8つの迷路を脱出するまでにある程度の時間が掛かります。
※待つのが嫌な場合は、[Run faster]ボタンを左クリックしてください。指定の周波数で動作するので、高速・低速を自由に調整できます。デフォルトでは高速に動作します。右クリックすれば、周波数を変更できます。


すべての迷路を脱出することでクリアとなります。

References
| ↑1 | https://ja.wikipedia.org/wiki/%E8%BF%B7%E8%B7%AF |
|---|---|
| ↑2 | 大半のマイクロマウス競技では中央にゴールのある迷路が採用されます。 |
| ↑3 | ドア(物体コード3)かどうかの条件を組み込むアプローチでもうまくいきますが、壁の有無をチェックするのが自然です。 |